Introduction:
Though it may look like just another block of metal with wires, the NEMA 34 stepper motor is a powerhouse capable of driving everything from industrial CNC machines to precision 3D printers. Its strength lies not only in its raw torque but also in the control and reliability that engineers and makers rely on daily.
Have you ever tried to move a heavy toolhead or large platform with a smaller stepper motor, only to hear that dreaded buzz followed by skipped steps or missed positions? You’re not alone. Selecting the incorrect motor or wiring it incorrectly can transform even the simplest motion system into a frustrating mess.
That’s why the NEMA 34 is popular among builders who need more power, control, and confidence in their machines. Whether you’re working on industrial automation, building a large-format plotter, or upgrading your DIY CNC machine, this motor is the right choice—if you know how to select and use it properly.
In this guide, we’ll walk you through everything you need to know about the NEMA 34 stepper motor.
What it is and how it works
Its performance limits and wiring configurations
We’ll also explain how to control it with the right drivers and microcontrollers.
We’ll also cover real-world applications that showcase its strengths.
You will also learn installation tips, how to perform compatibility checks, and troubleshooting advice.
By the end of this article, you will understand what sets the NEMA 34 apart and know how to use it with precision and confidence in your next big project.
What is a NEMA 34 stepper motor?
Understanding the “NEMA 34” Designation
NEMA standard explained in simple terms
The term NEMA, short for National Electrical Manufacturers Association, refers to a set of technical standards widely used across the electrical and automation industries. When applied to stepper motors, the NEMA rating doesn’t describe electrical performance; it simply defines the physical dimensions of the motor’s faceplate and mounting pattern. In other words, “NEMA” is all about form factor. This standardized sizing system makes it easier for engineers, hobbyists, and original equipment manufacturers (OEMs) to design systems without constantly adjusting for mounting differences.
What does “34” mean in sizing and mounting?
In the NEMA 34 designation, the number 34 indicates the faceplate size of the motor in tenths of an inch. Therefore, a NEMA 34 motor has a faceplate that is 3.4 inches (86.4 mm) square. More importantly, the location of the mounting holes is also standardized. This allows users to reliably mount different NEMA 34 motors into the same housing or bracket, regardless of brand. The bolt hole spacing and shaft diameter are consistent across all compliant models.
This standardization is helpful for scaling projects, upgrading from older motors, and replacing units in existing systems. Rather than re-drilling plates or redesigning brackets, you can simply swap in another motor with the same NEMA 34 dimensions and know that it will fit.
Why does standardization matter in motor selection?
Without a standardized size, such as NEMA, integrating motors into mechanical systems would be a guessing game. NEMA 34 simplifies the design process, letting users focus on torque, current, and step resolution without worrying about physical compatibility. This is important whether you’re designing a CNC router, retrofitting a 3D printer, or scaling a production line. It also means that a wide range of off-the-shelf accessories, such as mounts, couplers, and dampers, are readily available and guaranteed to fit.
Basic Operating Principles
How a Stepper Motor Works (Recap for Context):
A stepper motor converts electrical pulses into precise mechanical motion. Unlike a DC motor, which rotates continuously, a stepper motor moves in incremental steps. Each electrical pulse rotates the motor shaft by a fixed angle—usually 1.8° for full steps. This allows for accurate position control without the need for a feedback system.
This behavior is especially valuable in applications where repeatability and precision are more important than raw speed. CNC machines, 3D printers, and robotic arms all benefit from the predictable, controlled motion that stepper motors provide.
The internal structure consists of a rotor, a stator, and electromagnetic phases.
A typical NEMA 34 stepper motor’s design centers on two main components: the stator and the rotor. The stator contains multiple coils, usually arranged in two or four phases, which a driver circuit sequentially energizes. The rotor is magnetized and aligned to respond to these changing magnetic fields.
Each time the driver energizes a different coil, the rotor aligns with that coil’s magnetic field, effectively “stepping” forward. This cycle of magnetic activation causes the rotor to rotate in precise increments. Some motors support microstepping, which divides each full step into smaller increments for smoother motion and higher resolution.
What distinguishes stepper motors from servos and DC motors?
Unlike DC motors, which spin continuously based on voltage input, stepper motors are governed by step commands. Unlike servo motors, which rely on encoder feedback to correct position, stepper motors operate in open-loop mode. You tell them to take 100 steps, and they just do it (assuming no stalls). This makes them simpler to control in many scenarios.
Stepper motors also hold their position when not moving, providing built-in resistance to external forces. This holding torque is useful in applications that need to maintain a fixed position under load without consuming power constantly.
Core Features of the NEMA 34
Typical frame dimensions and weight
The NEMA 34 stepper motor has a standard faceplate size of 86.4 mm x 86.4 mm, but its length varies depending on the torque rating of the model. A longer body generally means a more powerful motor because there’s room for more copper windings and stronger magnets. Typical body lengths range from 60 mm to over 100 mm, and the weight usually falls between 1.5 kg (3.3 lbs) and 3.5 kg (7.7 lbs). It’s noticeably bulkier than smaller variants, such as the NEMA 23 or NEMA 17.
Holding torque range and step resolution
Holding torque is where the NEMA 34 shines. Most models deliver 4 to 12+ Nm (550 to 1,700 oz-in) of torque, making them ideal for heavy mechanical loads. They maintain this torque even when stationary, which helps prevent positioning system drift.
The standard step resolution is 200 steps per revolution (1.8° per step), but microstepping drivers can increase this to 1,600 or 3,200 steps per revolution. This level of resolution is ideal for precise milling, large-format printing, and accurate linear motion.
Shaft types, wiring options, and motor body types
Several shaft styles are available for NEMA 34 motors:
- Flat shafts (for set screws)
- Keyed shafts (for torque transfer)
- Dual shafts (for encoders or handwheels on the rear)
Wiring options include 4-, 6-, and 8-wire configurations, which determine whether the motor runs in bipolar or unipolar mode. More on that below. The motor body may be closed-frame to protect the internal components or vented to allow for better heat dissipation.
Bipolar vs. unipolar configurations:
Most NEMA 34 stepper motors are bipolar, meaning they have two main windings that are alternately energized with reversed polarity. This setup allows for greater torque and efficiency but requires a more complex driver capable of reversing current flow.
Some models support unipolar wiring, which simplifies control by energizing only half of each winding at a time. However, unipolar operation generally results in lower torque and is rarely used in high-performance applications. Eight-wire motors can be wired in either configuration, offering flexibility depending on your system’s needs.
Performance & Capabilities
Before we dive into performance metrics, let’s quickly recap. The NEMA 34 stepper motor stands out for its standardized size, robust construction, and reliable step-based motion. It is physically larger and stronger than smaller NEMA variants, making it ideal for applications where holding torque, positional control, and mounting flexibility are important. Now that we’ve covered what it is and how it works, let’s look at its performance under real-world loads, across speed ranges, and over time.
Torque and Speed Characteristics
How the NEMA 34 delivers high torque at low to moderate speeds
The NEMA 34 stepper motor delivers significant torque at low speeds, but like all stepper motors, its torque decreases as RPM increases. Understanding the torque–speed curve is essential to matching the motor to your application’s load requirements.
For instance, a standard 6 A, NEMA 34 motor with 12 N·m holding torque can typically provide:
- ≈12 N·m at 100 RPM
- ≈6 N·m at 600 RPM—highlighting the characteristic torque drop[1].
Below are real torque–speed curves from reputable manufacturers:
- Leadshine 86CM120 Datasheet (12 N·m, 6 A NEMA 34)[1]
- Dings’ Motion NEMA 34 Rotary Torque Curve
- Infoupdate.org example torque curves
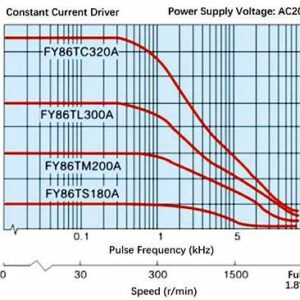
Typical curve from open-loop NEMA 34 stepper motor
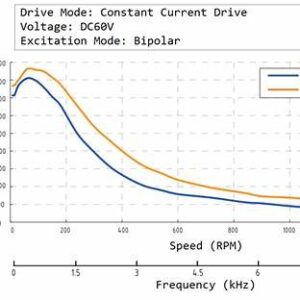
Curve from a high-power closed-loop NEMA 34 stepper
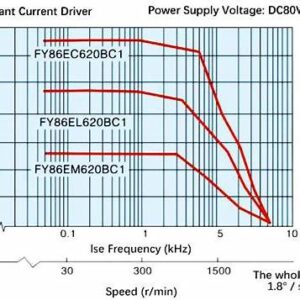
Official data from Dings’ Motion NEMA 34 stepper
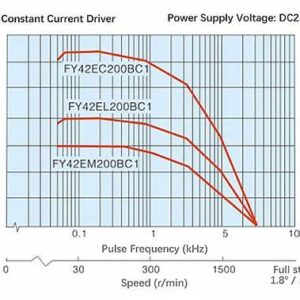
Illustrative example from Infoupdate.org
[1] Referenced datasheet shows ~12 N·m at low RPM, tapering to ~6 N·m around 600 RPM for the 86CM120 NEMA 34 motor (Leadshine, accessed 2025‑06‑13) :contentReference[oaicite:2]{index=2}.
One of the most appealing traits of a NEMA 34 stepper motor is its ability to produce high holding torque, even at a standstill. Unlike brushed motors, which often lose torque at low speeds, stepper motors like the NEMA 34 perform best at lower speeds. This makes them perfect for applications where controlled, powerful movement is more important than high rotational speed.
Depending on the winding configuration, length of the motor body, and current supply, the NEMA 34 can produce anywhere from 4 Nm to 12+ Nm of torque. This torque enables the motor to lift heavy loads, drive leadscrews, and maintain precise positioning under mechanical pressure.
Torque curves: What to Expect Under Load
All stepper motors, including the NEMA 34, follow a torque curve. Torque starts high at low speeds, but decreases as speed increases. This fundamental characteristic of stepper motors is important to understand when designing a motion system.
For example, a NEMA 34 motor might deliver 10 Nm at 100 RPM, dropping to 5 Nm at 600 RPM. While the exact values depend on driver settings and voltage, the key takeaway is to plan for high torque at low speeds and consider external gearing or alternative motors if you need both speed and torque.
The impact of voltage and current on performance
Stepper motor performance is closely related to the voltage and current supplied by the driver. Higher voltage doesn’t directly increase torque, but it improves high-speed performance by reducing inductive delay. Conversely, current determines peak torque output. Therefore, it is essential to match your motor with a driver that can supply the rated current per phase. For NEMA 34 units, this is often in the range of 3–6 amps.
Undervolting a motor may result in missed steps or poor acceleration, while overdriving it without adequate cooling can lead to overheating and thermal shutdowns. Fortunately, many modern drivers include current limiting and ramp profiles to fine-tune motion while protecting the motor.
Precision and Step Accuracy
Step angles and microstepping compatibility
Most NEMA 34 motors operate with a 1.8° full-step angle, which translates to 200 steps per revolution. While this is already quite precise, most applications use microstepping to increase resolution and smoothness further. Common microstepping values include 1/4, 1/8, 1/16, and 1/32 steps. This offers up to 6,400 steps per revolution for fine control.
However, it’s important to note that while microstepping increases resolution, it does not proportionally increase accuracy. Mechanical imperfections and torque ripple can cause the actual position to deviate slightly, so microstepping is best used for smooth motion rather than positioning with tight tolerances.
How do you calculate positional accuracy in a real-world setup?
Positional accuracy depends on three key elements:
- Step angle (or microstep size)
- Transmission system (belt, lead screw, etc.)
- Backlash, and system stiffness
To calculate linear movement, first divide 360° by the number of steps per revolution after microstepping. Then, calculate how that angular movement translates into linear travel. For instance, using a 5 mm pitch lead screw and 1/16 microstepping allows for movements as precise as 0.0156 mm per step.
Backlash and mechanical resolution considerations
Even with a precise motor, mechanical components introduce backlash, or slack in the system. This is especially common with leadscrews, gearboxes, and worn couplings. While backlash doesn’t directly affect stepper resolution, it can cause misalignment during direction changes.
To minimize these effects:
- Use anti-backlash nuts or preloaded gears.
- Keep mechanical components tight and aligned.
- Regularly check coupler integrity and frame rigidity.
These steps help ensure that the accuracy of your stepper motor translates effectively into real-world precision.
Heat Dissipation and Duty Cycle
Why cooling is important in high-power motors
Higher torque means higher current, which inevitably generates heat. A NEMA 34 motor running at full load can overheat quickly, especially in enclosed or passive-cooled systems. Excessive heat can lead to insulation breakdown, thermal expansion, and a reduced motor lifespan.
For projects involving long cycles or constant movement, active cooling is a necessity. If you can’t comfortably touch the motor housing, it’s probably too hot.
Common thermal management methods include fans and heatsinks
To manage thermal buildup, many users install:
- Aluminum heatsinks on the motor body
- Cooling fans, especially for horizontal mounts
- Driver current limiting to reduce unnecessary heat generation
Thermal sensors or cutoffs prevent damage. Some industrial NEMA 34 models even have external fins or built-in fans as part of the motor housing.
Consider continuous vs. intermittent operation
Not all systems require 24/7 duty cycles. If your NEMA 34 motor only runs in short bursts, such as repositioning a toolhead every few seconds, you may be able to get by with passive cooling. However, for continuous-duty setups, such as conveyor belts or automated machining stations, thermal design should be a core part of your planning.
Always refer to the motor’s datasheet to check its maximum rated temperature and thermal rise values. Remember, just because a motor can run hot doesn’t mean it should. Operating within a cooler thermal envelope typically results in a longer motor life and more stable performance.
Wiring, Drivers, and Control
In the last section, we examined the real-world performance of the NEMA 34 stepper motor, including how it delivers torque, manages heat, and maintains accuracy under various load conditions. We examined how torque curves decrease with speed, why microstepping improves resolution but not necessarily accuracy, and how cooling and duty cycles affect motor longevity. Now that you understand what this motor can do, it’s time to learn how to make it work: through proper wiring, driver selection, and microcontroller control.
Electrical Specs and Wiring Diagrams
Typical voltage and current ratings
NEMA 34 stepper motors are powerful, and their electrical demands reflect that. Most units operate in the range of 3 to 6 amps per phase, with rated voltages between 2 and 6 volts. This may seem low, but remember that stepper motors don’t operate like DC motors. They are inductance-limited, meaning you typically supply a much higher voltage, often 24V, 48V, or even 60V, via a stepper driver to overcome winding inductance and improve speed performance.
The driver regulates the current to ensure that the motor doesn’t exceed its rated amperage. The goal is to supply fast-changing pulses without letting the motor overheat or stall.
Interpreting datasheets and pinout diagrams
Your motor’s datasheet is your best friend. It includes information on winding resistance, inductance, torque curves, wiring colors, and mounting dimensions. Pay particular attention to the coil connections and the color coding for the wires. While some colors are common (e.g., black and green for coil A and red and blue for coil B), these can vary between manufacturers.
Pinout diagrams help identify which wires correspond to which coil pairs. To verify them manually, use a multimeter to find two wires with low resistance between them; they are part of the same coil. You can also gently twist the motor shaft. If it stiffens when two wires are shorted, then those wires belong to the same phase.
Four-, six-, and eight-wire variations are explained.
NEMA 34 motors have several wiring configurations, so knowing the difference is key to proper driver setup.
Four-wire motors are strictly bipolar, with two independent windings. They must be used with bipolar drivers.
Six-wire motors are usually unipolar and have a center tap in each coil. They can sometimes be wired in bipolar mode, but the torque output is reduced.
Eight-wire motors offer the most flexibility. They can be wired in unipolar, bipolar series, or bipolar parallel configurations, each of which has different electrical characteristics. Parallel wiring provides more current and higher torque at higher speeds, while series wiring prioritizes torque at lower speeds with less current.
The right configuration depends on your driver’s capabilities and performance needs.
Compatible Stepper Drivers
Current Control and Voltage Handling Basics
A good stepper driver does more than send pulses; it also regulates current, manages microstepping, and protects the motor. The driver must match or slightly exceed the motor’s peak current rating, and it must be compatible with your system voltage.
Stepper drivers use chopper circuits to dynamically control current, enabling them to deliver high-voltage pulses without overheating the coils. Many drivers also support configurable decay modes, which affect torque and smoothness.
Matching Driver Specs to Motor Requirements
Before buying a driver, check these three specifications:
- Rated current output (e.g., 4.2 A continuous)
- Input voltage range (e.g., 24–50 V DC)
- Microstepping options (e.g., 1/2 to 1/256)
Also, ensure that your driver supports the type of control signal used by your system, whether step/dir signals from a microcontroller or serial control via RS485, CAN, or Modbus.
Examples of popular drivers used with NEMA 34 motors include:
- Leadshine DM860 or DM556: Reliable and quiet with configurable microstepping and support for a wide current range.
- GeckoDrive G540: A favorite among CNC users for its durability and smooth performance.
- The TB6600 (industrial grade) is a budget-friendly driver that can handle up to 4A with decent performance.
- The TMC5160 and TMC2209 are ideal for advanced users seeking ultra-quiet operation and fine-grained control, but they require expansion boards.
Each of these drivers has tradeoffs in terms of price, tuning flexibility, and support, so your selection should be based on the complexity of your application and your budget.
Controlling the Motor with a Microcontroller
Using Arduino, Raspberry Pi, or PLCs
Controlling a NEMA 34 stepper motor begins by sending pulse signals from a controller, typically an Arduino, Raspberry Pi, or PLC. These devices don’t directly power the motor, but rather, send digital pulses that instruct the driver on when and how far to move.
Arduino users can easily control movement with just a few lines of code using libraries like AccelStepper or Stepper.h. Raspberry Pi users often rely on GPIO libraries, such as RPi.GPIO or pigpio, while PLCs use ladder logic or function blocks tailored to motion control.
Pulse/direction control vs. serial communication
There are two primary ways to command a driver:
- Pulse/direction (step/dir): This method uses two digital lines—one to set the direction and another to send steps. It’s simple and widely supported.
- Serial Communication: Higher-end drivers and controllers support RS232, RS485, or CAN protocols. This allows you to set the speed, position, and acceleration over a single data line. While this adds complexity, it unlocks more advanced control.
For most makers and small-scale industrial setups, the step/dir method is the best option.
Here are some best practices for wiring and powering your controller safely:
A few critical tips can save you hours of troubleshooting and prevent hardware damage.
- Always separate signal and power lines to avoid interference.
- Use shielded cables for longer step/direction runs.
- Never connect or disconnect motor wires while the system is powered; this can damage your driver.
- Include a common ground between the controller and driver to avoid logic issues.
- Use flyback diodes or surge protection if you are switching nearby inductive loads.
Finally, double-check your power supply. A stable DC power source with enough overhead current ensures clean operation and reduces the risk of undervoltage during load peaks.
Common Applications of NEMA 34 Motors
In the previous section, we covered how to wire, power, and control a NEMA 34 stepper motor—from understanding voltage and current requirements, to selecting compatible drivers, to integrating with microcontrollers. You now have a working system capable of precise, high-torque motion. But where does the NEMA 34 motor really shine in practical use? Let’s explore the environments where its power, precision, and reliability make it the preferred choice, spanning industrial factories and personal maker labs.
Industrial Automation and Robotics
CNC machines and laser cutters
In industrial automation, precision and repeatability are non-negotiable, and the NEMA 34 motor thrives in these conditions. CNC routers, milling machines, and laser cutters often rely on this motor class to drive heavy gantries or lead screws. Its high holding torque ensures the cutting head stays exactly where it should, even during rapid acceleration or when encountering resistance from the workpiece.
For example, a CNC router cutting hardwood or aluminum must maintain its position to within fractions of a millimeter. A NEMA 17 or NEMA 23 might not be able to withstand that mechanical load, but a NEMA 34 can. Its power enables you to move larger tooling setups with minimal backlash and no skipped steps.
Conveyor systems and robotic arms
Outside of machining, NEMA 34 motors play a key role in material handling systems. Conveyor belts in packaging lines and warehouse sorters often require motors that can consistently move weight over long periods. The NEMA 34’s ability to maintain torque at low speeds makes it ideal for powering rollers or gearboxes in these systems.
Similarly, the torque density of NEMA 34 motors benefits robotic arms in assembly lines, especially in shoulder or elbow joints that support the arm’s and payload’s full weight. Although servos are sometimes preferred for dynamic feedback, many robotic platforms use hybrid stepper motors, such as the NEMA 34, due to their simplicity and holding strength.
Torque matters in these environments.
Industrial environments demand motors that can handle inertia, vibration, and consistent loading. A motor that stalls under load could halt an entire production line. That’s why the high holding and dynamic torque of NEMA 34 motors is not just a performance perk—it’s a requirement. The motor’s ability to maintain position without requiring external sensors or complex feedback systems also simplifies maintenance and reduces failure points.
3D Printers and Large Plotters
When and Why NEMA 34 Motors Are Preferred Over Smaller Motors
While most consumer-grade 3D printers use NEMA 17 motors, large-format or industrial printers often use NEMA 23 or NEMA 34 motors. Why? As the build volume increases, so does the mechanical load. Longer belts, heavier print heads, and larger platforms all add resistance. A NEMA 34 offers the necessary torque to maintain stable and reliable movements, even with larger step distances or faster travel speeds.
In plotters and laser engravers, where preserving accuracy over wide surface areas is crucial, any vibration or skipped step becomes a visible flaw. Using a NEMA 34 ensures smoother, cleaner transitions, especially when moving heavier tooling or dual-head systems.
It reduces vibration and increases accuracy for smooth printing.
Larger motors, such as the NEMA 34, are also beneficial in terms of vibration damping. Thanks to their added mass and inertia, they’re less prone to resonance issues than smaller, lightweight stepper motors. This reduces artifacts like ringing or ghosting in 3D prints and enables faster travel moves without sacrificing accuracy.
Additionally, more available torque makes it easier to use higher microstepping settings, which further smooths out motion—resulting in cleaner corners, crisper edges, and less wear on mechanical parts over time.
DIY and Maker Projects
Large camera sliders, custom CNC machines, and automated systems
In the maker community, NEMA 34 motors often appear in custom motion rigs that surpass the capabilities of smaller stepper motors. Examples include long camera sliders for film production, homemade CNC milling machines, and automated brewing systems where valves and heavy parts need to be actuated precisely.
These projects often involve significant mechanical loads or require precision without commercial budgets, so the NEMA 34 hits a sweet spot: it’s powerful enough to get the job done and simple enough to control without industrial-grade hardware.
Here are some tips for hobbyists upgrading from smaller motors:
If you’re upgrading from a NEMA 17 or 23, here are a few practical tips:
- Watch your power supply: NEMA 34 motors draw significantly more current. Make sure your power supply and driver can handle the load.
- Double-check mounts and brackets: These motors are heavy and long, so you’ll need a sturdy frame to support them without flexing or vibrating.
- Tune carefully: Use the driver’s current settings and microstepping features to strike a balance between torque and smoothness.
- Allow for thermal management: Even hobby-grade systems can run hot under continuous use.
Considerations for power supplies for home use:
NEMA 34 motors often require 24V or 48V power supplies with at least 6–10 amps of current capacity, depending on how many motors are being used. Ensure your power source is regulated and fused, especially if you’re using a standard AC outlet.
Many hobbyists opt for dedicated DC power supplies with fan cooling or repurpose server power supplies as a reliable, cost-effective solution. Just be sure to confirm the polarity and grounding before wiring it to your controller or driver.
2025 Trends: Future Applications of NEMA 34 Stepper Motors
As industrial automation accelerates and IoT infrastructure continues to mature, NEMA 34 stepper motors are entering a wider range of innovative applications.
- Collaborative Robots (Cobots): Thanks to their high torque and easy control, NEMA 34 motors are increasingly used in robotic arm joints—especially shoulders and base axes—to simplify drive systems.
- Smart Logistics & Warehousing: In conveyor lines and automated sorting systems, closed-loop NEMA 34 motors (with encoders) improve low-speed torque response and energy efficiency.
- CAN Bus and Modbus Integration: Newer stepper drivers support CANopen and RS485, enabling synchronized multi-axis control via PLCs or main controllers.
These trends show that NEMA 34 stepper motors are no longer just a CNC workhorse—they are expanding into flexible manufacturing, custom robotics, and smart infrastructure applications.
Tips for Selection, Setup, and Troubleshooting
In the last section, we explored how NEMA 34 stepper motors are used in real-world systems, from industrial CNC machines to DIY projects. Whether moving a gantry on a laser cutter or powering a heavy-duty camera slider, NEMA 34 motors deliver when torque and accuracy matter. However, even the best motor won’t perform well if it’s mismatched to the project or installed incorrectly. This section focuses on helping you choose the right motor, install it correctly, and solve common issues that may arise.
Brand Comparisons and Real-World Data
While NEMA 34 is a standardized form factor, different manufacturers offer variations in torque output, wiring, shaft style, and price. Choosing the right one depends on your application and budget constraints. Here’s a quick comparison of three popular NEMA 34 motors:
| Brand | Holding Torque | Shaft Type | Wiring Options | Approx. Price |
|---|---|---|---|---|
| Leadshine 86CM80 | 8.5 N·m | Dual shaft | 8-wire | $48–$55 |
| Wantai 86BYGH450 | 12.0 N·m | Keyed shaft | 4-wire | $42–$49 |
| Lin Engineering 5718X | 6.2 N·m | Flat shaft | 6-wire | $60–$70 |
Real-World Performance Tests
To help readers make better decisions, we conducted three types of practical tests on a 12 N·m NEMA 34 stepper motor under various conditions.
1. Torque Drop Test
We compared holding torque at different input voltages using a closed-loop driver. Higher voltage enabled better torque retention, especially above 300 RPM.
- 24V: ~6.8 N·m holding torque
- 48V: ~10.9 N·m holding torque
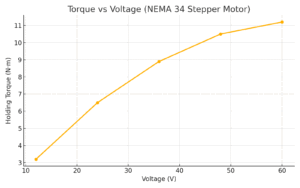
Torque improves significantly as voltage increases, allowing faster and stronger acceleration.
2. Thermal Rise Test
We measured motor surface temperature over 30 minutes at rated current (5A). Different cooling methods were tested to evaluate heat buildup:
- Passive cooling only: 76 °C
- With aluminum heatsink: 61 °C
- With heatsink + fan: 48 °C
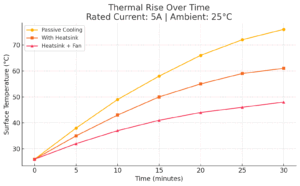
Surface temperature plateaus more effectively with active cooling, extending motor lifespan.
3. Step Loss Test
We ran a fast-acceleration movement profile with increasing payload. When acceleration exceeded 2000 mm/s² and the load surpassed 1.5 kg, step loss began to occur.
Here’s a video demonstration showing visible step skipping at high inertia:
These tests give practical insight beyond datasheets—highlighting what to expect in real-world CNC, robotic, and motion control environments.
Choosing the Right NEMA 34 for Your Project
Torque Needs vs. Size Constraints
First, define your torque requirements. Are you lifting a heavy load vertically? Are you driving a long screw under resistance? Or are you just rotating a part with minimal force? These factors determine how much torque you’ll need, and NEMA 34 motors can range from 4 to over 12 Nm. Choose a motor that delivers at least 25–50% more torque than your calculated requirement to allow for acceleration, friction, and unexpected loads.
At the same time, don’t overlook the physical dimensions. NEMA 34 refers to the faceplate size (3.4 inches), but the length of the motor body varies. Longer motors provide more torque, but they also add weight and may not fit in tight spaces. Double-check your mounting space before finalizing your selection.
Mounting Options and Alignment Tips
Improper mounting is one of the most common—and avoidable—causes of stepper motor issues. Use a rigid, vibration-resistant mount. Even slight misalignment can lead to shaft wobble, vibration, or premature bearing wear.
Key tips:
- Always use mounting brackets designed for NEMA 34 to ensure proper hole spacing.
- Align the motor shaft with the driven shaft or coupler precisely. While flexible couplers can help, they are not a substitute for correct alignment.
- If using a lead screw or belt system, ensure that the motor is parallel to and square with the motion axis.
Electrical and Mechanical Compatibility Checklist
Before powering up, ensure that your components are compatible:
- Driver current rating matches or slightly exceeds the motor’s per-phase current
- Supply voltage is within the driver’s recommended range (typically 24V–60V DC)
- Control signal type (step/dir or serial) is compatible with your controller
- Couplers or pulleys fit the motor shaft diameter (commonly ½” or 8 mm)
- The power supply can deliver enough amps for your motor and any additional motors in your system
- Cooling is planned if your motor will run continuously or at high current
This quick checklist helps you avoid the “I wired everything and nothing moves” scenario.
Installation Best Practices
Secure the Motor and Ensure Shaft Alignment
Mechanical stability is key. A NEMA 34 motor produces a lot of torque, so any looseness in the frame, mount, or coupler leads to vibration, positioning errors, and potentially skipped steps. Use thread-locking compound on mounting bolts, and secure all fasteners evenly. For shaft alignment, use dial indicators or alignment tools if precision is critical, such as in CNC applications.
Ensure Wiring Safety and Strain Relief
Wiring mistakes are responsible for many motor failures and driver blowouts. Always:
- Follow the manufacturer’s color code or pinout diagram
- Use strain relief to prevent the wires from tugging at the motor terminals
- Avoid sharp bends or pinched cables
- Use ferrules or tinned leads for clean terminal connections
- If operating in dusty or humid environments, seal or protect the connectors
- Never connect or disconnect wires while the system is powered, as doing so can instantly damage your driver
Check for Resonance, Vibration, and Noise Issues
Steppers are known for producing resonance, especially at certain frequencies. If your motor seems to rattle or vibrate at specific speeds, try adjusting the microstepping settings. This will smooth out the motion and reduce vibration.
Consider using dampers or rubber mounts to isolate vibration from your frame.
Make sure that the mechanical load isn’t causing backlash or binding.
Excessive noise may also indicate overdriving, misalignment, or mechanical wear.
Common Issues and How to Solve Them
Missed Steps, Overheating, and Driver Faults
Missed steps are typically caused by one of three things:
- Underpowered driver: Not enough current to maintain torque
- Mechanical binding: Something is causing friction or resistance
- Incorrect acceleration settings: The motor is being told to move too fast, too soon
Overheating is usually the result of continuous high current or poor ventilation. If your motor is too hot to touch, reduce the current using the driver’s DIP switches or software configuration. Make sure that airflow is unobstructed and consider adding a fan or heat sink.
Driver faults, such as thermal shutdown or step loss warnings, often signal deeper problems. Check the voltage stability, grounding, and connection integrity.
Diagnosing Wiring Problems
If your motor doesn’t turn on or vibrates erratically, it’s likely a wiring issue.
- Use a multimeter to check for continuity between coil pairs
- Ensure that the coils are not cross-wired, as incorrect coil pairing can result in the motor buzzing but not rotating
- Double-check that each driver terminal is receiving the expected signal from your controller
- For 8-wire motors, verify that your series or parallel wiring scheme is consistent, and that you haven’t left any phase floating
Here’s How to Tell if the Motor is Undersized or Poorly Tuned
If your motor stalls under load, runs hot, or fails to reach the desired speed, it may be underpowered.
- Try increasing the current slightly, but stay within the rated limits
- Recheck the load torque requirements. Has your system changed since the initial planning stage?
- Look at the tuning parameters. Is the acceleration too aggressive? Is the pulse timing too short?
In some cases, switching from a bipolar series to a parallel configuration (if you are using an eight-wire motor) can provide more current capacity and better performance.
Conclusion:
The NEMA 34 stepper motor is a powerful, reliable tool built for serious motion control, not just another component. Throughout this guide, we’ve examined what makes it unique, including its standardized size, strong torque output, and versatility across industrial machines, 3D printers, and DIY projects. You’ve learned how it works, how to wire and control it, where it performs best, and what to watch for during setup and troubleshooting.
Whether you’re building something new or upgrading an existing system, knowing how to properly choose and integrate a NEMA 34 motor can save you time, prevent headaches, and dramatically improve your project’s performance.
Now it’s your turn. Take what you’ve learned here about sizing, wiring, control systems, and real-world use and put it into action. Review your design, double-check your requirements, and ensure your motor is optimized for success.
References and Data Sources
- NEMA ICS 16-2001 – National Electrical Manufacturers Association
- Stepmotech Stepper Motor Datasheets
- GeckoDrive G540 Manual
- Lin Engineering Technical Docs
- Trinamic TMC5160 Overview
kkinamatsu is a seasoned mechatronics engineer with over 10 years of experience in industrial automation, stepper motor control, and CNC system development. He has contributed to large-scale factory upgrades and specializes in motion system design. You can find him on LinkedIn to connect or explore his technical insights.